#
6.4.3. Shortest-Paths Problems
Single-source shortest-paths problem
- Dijkstra’s algorithm
- Only nonnegative-weight edges are present.
- Bellman-Ford algorithm
- Negative-weight edges may be present, but there are no negative-weight cycles.
- Dijkstra’s algorithm
Single-destination shortest-paths problem
Singe-pair shortest-path problem
All-pairs shortest-paths problem
- Floyd-Warshall algorithm
- Negative-weight edges may be present, but there are no negative-weight cycles.
- Johnson’s algorithm for sparse graphs
- Negative-weight edges may be present, but there are no negative-weight cycles.
- Floyd-Warshall algorithm
The optimal-substructure property of shortest paths
- Subpaths of shortest paths are shortest paths!
#
Single-Source Shortest Path
Problem
- Given a weighted directed graph G = (V, E) with a weighting function w(e) (w(e) ≥ 0 for the edges in G), and a source vertex v_0, find a shortest path from v_0 to each of the remaining vertices of G.

Note
The case of an undirected graph can be handled by simply replacing each undirected edge e = (u, v) of length w(e) by two directed edges (u, v) and (v, u), each of the same length.
Only the case of a directed graph whose weights are positive (or nonnegative) is handled by the Dijkstra’s algorithm. For a graph that allows a negative weight, the Bellman-Ford algorithm is one to be used.
Before learning the single-source shortest path algorithm that builds some tree, recall how the breadth first search tries to build a BFS tree.
A breadth first search tree
A tree built by the Dijkstra’s algorithm

#
Dijkstra’s Single-Source Shortest Path Algorithm
- A greedy approach
- Generate the shortest paths in non-decreasing order of lengths!
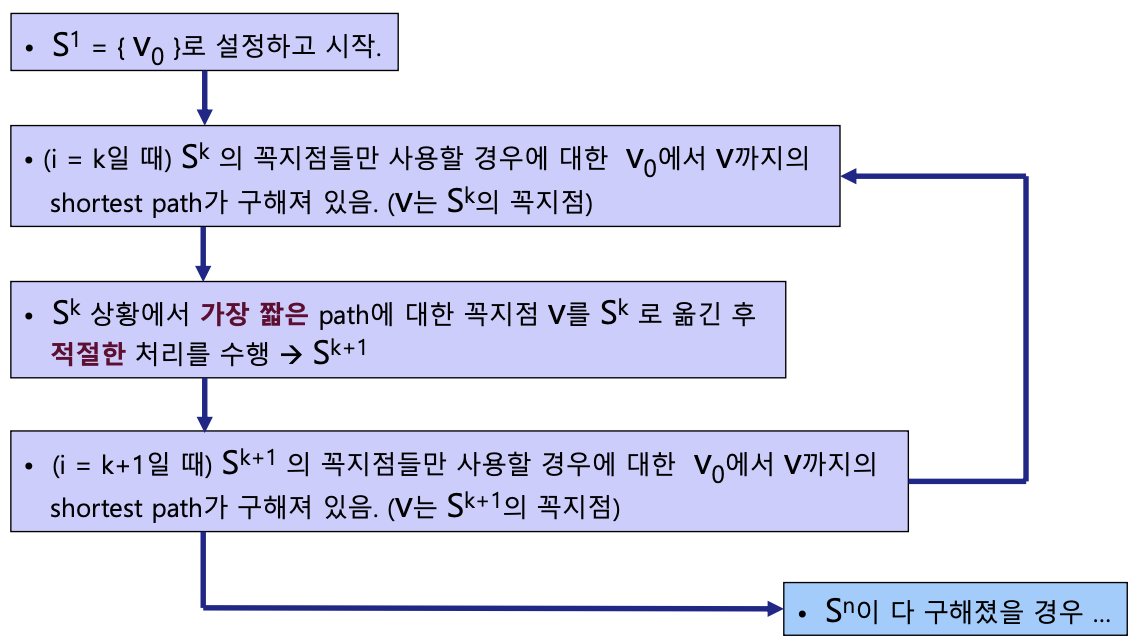
- $S^1={ v_0 }$로 설정하고 시작.
- ($i=k$일 때) $Sk$의 꼭지점들만 사용할 경우에 대한 $v_0$에서 $v$까지의 shortest path가 구해져 있음. ($v$는 $Sk$의 꼭지점)
- $Sk$상황에서 가장 짧은 path에 대한 꼭지점 $v$를 $Sk$로 옮긴 후 적절한 처리를 수행 → S^{k+1}
- ($i = k+1$일 때) S^{k+1} 의 꼭지점들만 사용할 경우에 대한 $v_0$에서 $v$까지의 shortest path가 구해져 있음. ($v$는 $S^{k+1}$의 꼭지점)
- 다시 2. 로 감
- S_n 이 다 구해졌을 경우
#
From Prof. Kenji Ikeda's Home Page
#
Dijkstra’s Algorithm
(from Introduction to Algorithms by T. Cormen)
A directed graph with nonnegative weight G(V, E) with w: E→ [0,∞) and source s
Two components for each vertex v
v.d: an upper bound on the weight of a shortest path from s to v (a shortest path estimate)v.π: the predecessor of v in the (current) shortest pathInitialize-Single-Source(G,s) for each vertex v in G.V v.d = infinite v.pi = NIL s.d = 0
Relaxation
The process of relaxing an edge (u, v) consists of testing whether we can improve the shortest path to v found so far by going through u and, if so, updating
v.dandv.π.Relax(u,v,w) if v.d > u.d + w(u,v) v.d = u.d + w(u,v) v.pi = u- 아직 shortest path를 찾지 못한 vertex v에 대해
- 새롭게 선택된 vertex u에 adjacent한 vertex v에 대해

#
Dijkstra’s Single-Source Shortest Path Algorithm
Dijkstra’s algorithm
Maintains a set S of vertices whose final shortest-path weight from the source s have already been determined.
- Select repeatedly the vertex u in V-S with the minimum shortest-path estimate
- adds u to S
- relaxes all edges leaving u.
Dijkstra(G,w,s) 1 Initialize-Single-Source(G,s) 2 S = zero-set 3 Q = G.V 4 while Q != zero-set 5 u= extract-min(Q) 6 S= S U {u} 7 for each vertex v in G.Adj[u] 8 Relax(u,v,w)When the algorithm adds a vertex u to the set S,
u.dis the final shortest-path weight from s to u.

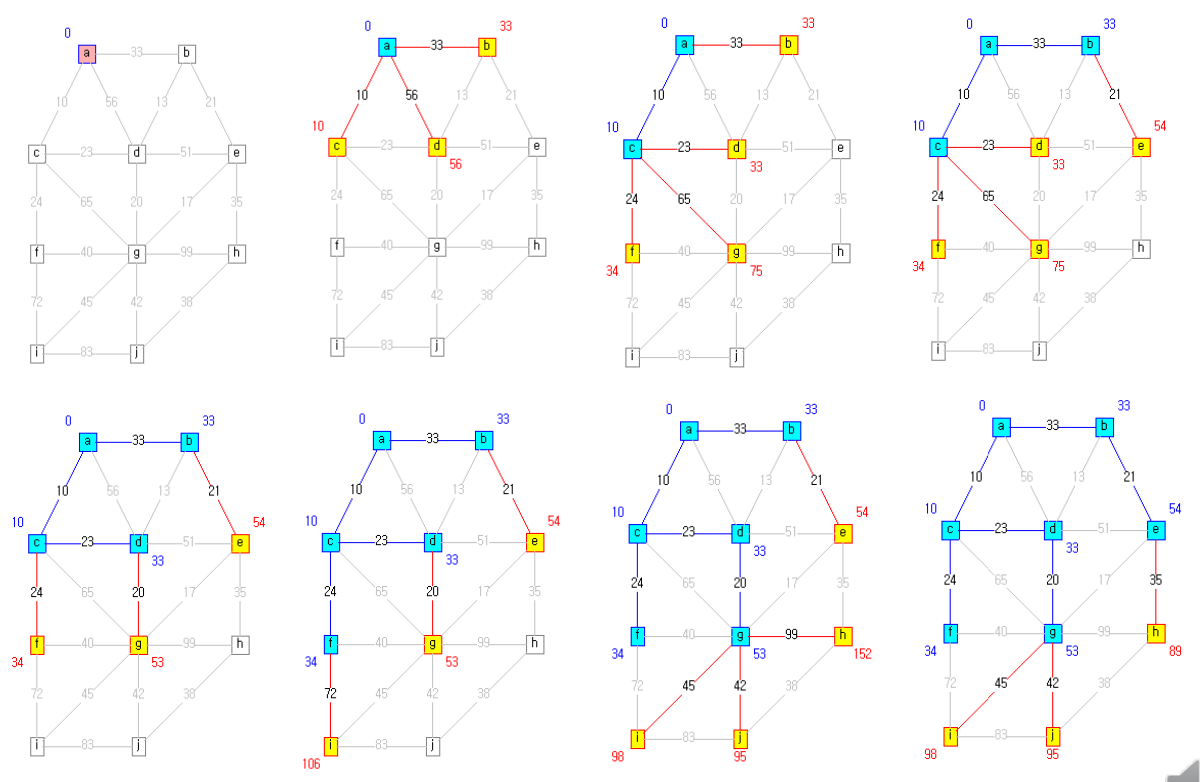
계산과정 예

Correctness of Dijkstra’s algorithm
- Theorem
- Dijkstra algorithm, run on a weighted, directed graph $ G=(V,E)$ with nonnegative weight function w : E \rightarrow R and source s, terminates with v.d = \delta(s,v) \forall vertices v \in V
- Loop invariant
- At the start of each iteration of the while loop of lines 4-8, v.d = \delta(s,v) for each vertex v \in S
- A key in the proof
to show that for each vertex u \in V, we have u.d = \delta(s,u) at the time when u is added to set S
Suppose for contradiction that u be the first vertex for which u.d \neq \delta(s,u) when it is added to set S
Dijkstra(G,w,s) 1 Initialize-Single-Source(G,s) 2 S = zero-set 3 Q = G.V 4 while Q != zero-set 5 u= extract-min(Q) 6 S= S U {u} 7 for each vertex v in G.Adj[u] 8 Relax(u,v,w)
s ---> x ->y가 shortest path이므로, $x$가 $S$에add되면서x->y에 relaxation할 때,y.d에 $δ(s, y)$가 저장. 따라서 $u$가 $S$에add가 될 때에도y.d= δ(s, y).- y.d = \delta(s,y)
- u.d \leq \delta(s,y) \leq u.d \rightarrow \delta(s,u) = u.d
- y.d = \delta(s,y) \leq \delta (s,u) \leq u.d
- u.d \leq y.d

- Theorem
#
An O(n^2) Implementation : Adjacency Matrix 사용
S: the set of vertices, including v_0, whose shortest paths have been founddistance[w]: the length of the shortest path starting from v_0, going through vertices only in S, and ending in w (w \notin S)Observations
When the shortest paths are generated in nondecreasing order of length,
If the next shortest path is to vertex u, then the path from v_0 to u goes through only those vertices that are in S.
Vertex u is chosen so that it has the minimum distance
distance[u]among all the vertices \notin S.Adding u to S may change the distance of shortest paths starting at v_0 going through vertices only in the new S, and ending at a vertex w that is not currently in the new S.
distance[w] = \min \{distance[w], distance[u] + length(<u, w>) \}

V = \{ v_0, v_1, ..., v_{n-1}\} with |V| = n
distance[i]: the length of the SP from vertex v to ifound[i]- FALSE if the SP from vertex i has not been found,
- TRUE otherwise
cost[i][j]: cost adjacency matrixcode in [Horowitz]
int choose(int distance[], int n, int found[]) { int i, min = INT_MAX, minpos = -1; for (i = 0; i < n; i++) // O(n) if (distance[i] < min && !found[i]) { min = distance[i]; minpos = i; } return minpos; } void shortestpath(int v, int cost[][MAX_VERTICES], int distance[], int n, int found[]) { int i, u, w, tmp; for (i = 0; i < n; i++) { found[i] = FALSE; distance[i] = cost[v][i]; } found[v] = TRUE; distance[v] = 0; for (i = 0; i < n - 2; i++) { // O(n) // find the next u to be added to S u = choose(distance, n, found); found[u] = TRUE; // add u to S for (w = 0; w < n; w++) if (!found[w]) // for w not in S if ((tmp = distance[u] + } } cost[u][w]) < distance[w]) distance[w] = tmp;
#
An O(e \log n) Implementation: Adjacency List 사용
매 순간 $wt[w]$에는 항상 S_k 의 꼭지점들만 사용할 경우에 대한 $v_s$에서 $w$까지의 shortest path의 길이가 저장되어 있음.
wt[]는 앞의 프로그램에서의distance[]에 해당n = |V|, e = |E|

typedef struct node \*link; struct node { int v; double wt; link next; }; struct graph { int V; int E; link *adj; }; typedef struct graph *Graph;#define GRAPHpfs GRAPHspt #define P(wt[v] + t->wt) void GRAPHpfs(Graph G, int s, int st[], double wt[]){ int v, w; link t; PQinit(); priority = wt; for (v = 0; v < G->V; v++){ //O(n) st[v] = -1; wt[v] = maxWT; PQinsert(v); } wt[s] = 0.0; PQdec(s); // log n while (!PQempty())// 언제 끝날까? if (wt[v = PQdelmin()] ! = maxWT) //어떤 경우인가? for (t = G->adj[v]; t != NULL; t = t->next) //O(e log n) if (P < wt[w = t->v]){ wt[w] = P; PQdec(w); //log n //다 끝난 후 각 꼭지점에 대한 sp를 어떻게 출력할까? st[w] = v; } } }
MO ̈HRING et at., Partitioning Graphs to Speedup Dijkstra’s Algorithm, ACM Journal of Experimental Algorithmics, 2006.
Standard Dijkstra’s Algorithm

Acceleration Algorithm
